GCAPS is officially a research center of the Virginia Tech Transportation Institute. This website will redirect to www.vtti.vt.edu in fall 2026.
Solving challenging and unique problems to further the development and safety of the mobility industry
We are a collection of problem solvers with a wide range of backgrounds ranging from controls, physics, dynamic systems, and machine learning to tire mechanics. Our passion is to help our customers focus on their core products while enhancing the capability and safety of the mobility industry. We accomplish this by conducting research, simulation, and/or physical testing to establish objective data for use in the development of our clients’ products.

What’s New at GCAPS?
Scenario
One unique resource used to solve critical issues for ADS and ADAS technology is naturalistic driving data (NDD) from the Virginia Tech Transportation Institute (VTTI). We convert the real world recorded NDD events into simulation ready datasets via video, radar, and time-series data reduction.
Research and Services:
- Event Replication
- Event Variation
- Intelligent Sampling
Sense
In ADS- and ADAS-equipped vehicles, human senses are being replaced by technology. Understanding the limitations of the technologies, effects from degradation (artificial or natural), and application in virtual development is critical for a robust product. Our testing techniques and research provide the basis for this understanding and for virtual products.
Research and Services:
- Sensor Characterization
- Sensor Degradation
- Sensor Modeling
- V2X Evaluation and Support
Perceive
Sensor data is, as the term states, is just data. It is the Perceive step that interprets that data and converts it to usable information. The usable information output by our algorithms is applied for large scale actor annotations, cyber security, and infrastructure assessment.
Research and Services:
- Sensor Fusion
- Detection Algorithm
- V2X
Plan
Planning for a Scenario involves many aspects of the vehicle and environment. Application of human behavior into our planning algorithms provides a more natural response. Combined with Safety Modeling based on NDD, our algorithms can also calculate the highest percentage of avoiding a safety critical event. Lastly, our knowledge of vehicle dynamics provides the physical bounds of vehicles and is inputted into the algorithms.
Research and Services:
- Behavioral Model
- Safety Modeling/Assurance
- Automated Maneuver Algorithms
- Vehicle Dynamics Modeling and Simulation
- Tire Testing (Force and Moment)
- Tire Modeling (MF, FTire, PAC2002, CDTire)
Control
Control algorithms for achieving a maneuver require knowledge of vehicle dynamics. This knowledge should start with understanding the tire’s influences through tire testing and modeling. Utilizing the world’s most capable flat belt force and moment equipment, we can provide this knowledge.
Leveraging NDD, human response bounds are implemented in our control algorithms to maintain comfort and security for passengers.
Research and Services:
- Behavioral based algorithms
- Tire Testing (Force and Moment)
- Tire Modeling (MF, FTire, PAC2002, CDTire)
Response
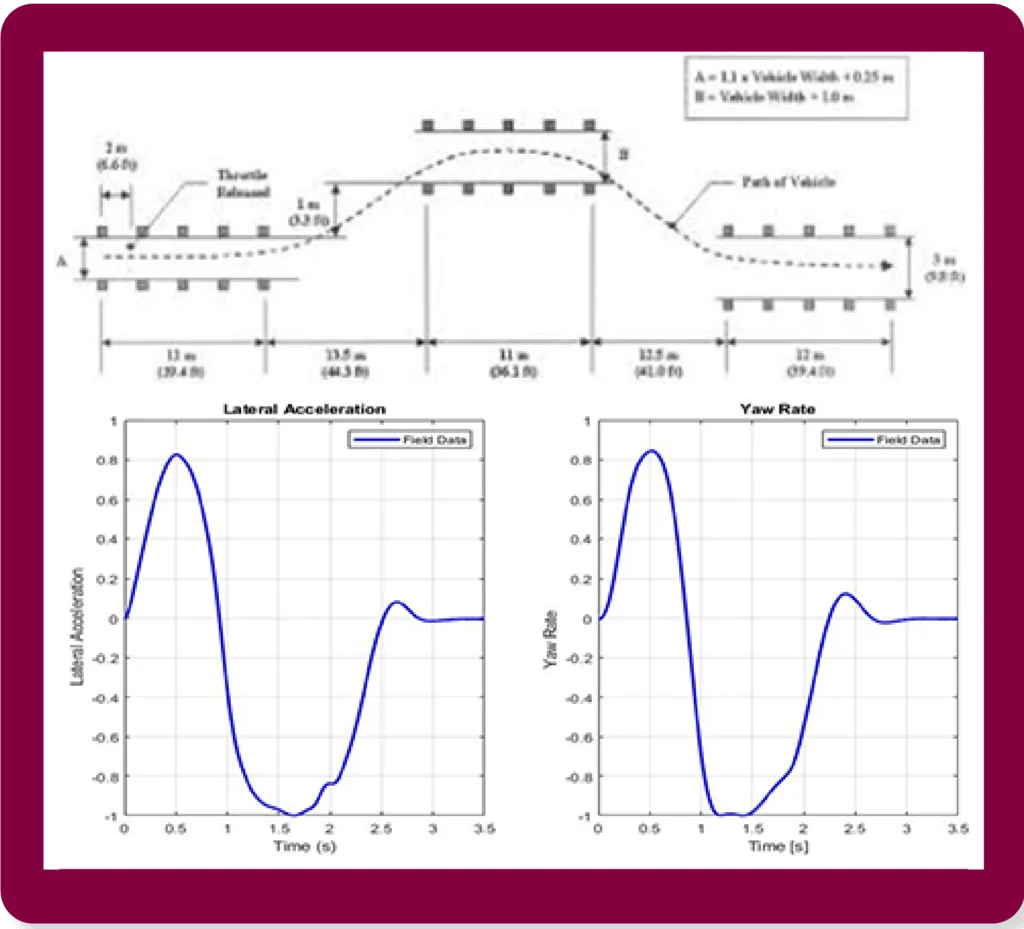
Assessment of a vehicle’s response to the Scenario can be conducted both physically and virtually. The performance is compared to established regulatory values, internally developed behavioral competency values, and safety models. These are processes and tools that can be used during development or as an added check prior to release to the public.
Research and Services:
- Behavioral Competency
- Vehicle Testing
Tire Testing
GCAPS’s equipment has been correlated with multiple vehicle and tire OEMs for model characterization data collection, construction comparisons, and advanced tire research.
The equipment, experience, and software at GCAPS makes it the ideal location for tire data collection. Contact us below for more information.
At GCAPS, we house top-level industry equipment designed for testing passenger car, light truck, motorsport, or motorcycle tires across all conditions encountered on the road.
Our capabilities beyond typical force and moment testing include GCAPS-developed:
- Flat Cleat Test Methods
- Wet Testing Methods
- Thermal Control Logic
For force and moment testing the LTRe has the unique capabilities of:
- Roadway Velocity: 200 mph/320 kph
- Spindle Torque: 10,000 Nm
- Vertical Load: 30,000 N
- Dynamic Positioning Rates: 90 SA deg/s, 38 IA deg/s, 400 mm/s RL
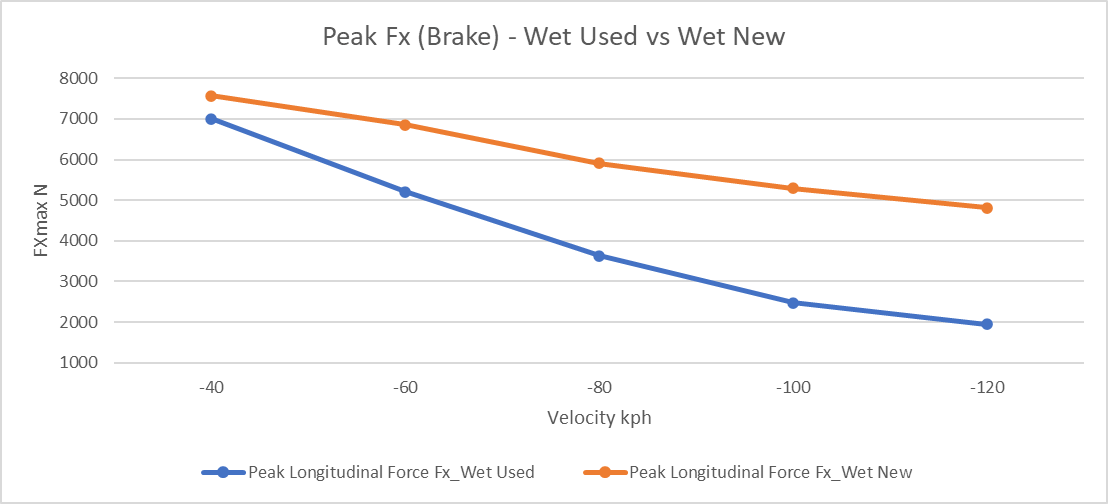
Wet Tire Testing & Modeling
GCAPS’s advanced tire testing equipment and techniques can be modified for data collection, construction comparisons, and advanced tire research in wet environments. With the GCAPS water delivery system and premier flat belt force and moment equipment, we can better understand hydroplaning and support different ODD for chassis control.
Application of wet testing data collection and modeling has been used by tire manufacturers to improve tread patterns, tread compounds, and wear impact for passenger car, light truck, and motorsport tires. MF models can be created for use in vehicle simulations.
Our wet testing capabilities extend beyond the typical force and moment testing and include:
- GCAPS-developed unique water delivery system
- Consistent water depths for speeds up to 250 kph
- GCAPS-designed nozzle provides nearly laminar flow
- Variable speed pump for roadway velocity adjustment
Contact GCAPS to move your wet performance tests from outdoor vehicle methods to a proven, reliable, and consistent indoor methodology.
Tire Modeling
GCAPS uses advanced testing equipment, techniques, and our in-house simulation expertise to create accurate and affordable tire models. Our simulation engineers have in-depth knowledge of the theory, parameterization, and application of multiple tire model formats to help customers determine the right model for the required vehicle simulation.
Our advanced testing capabilities include flat cleat test methods and thermal control logic, providing accurate data, which allows us to develop high fidelity tire models for a wide range of tire sizes.
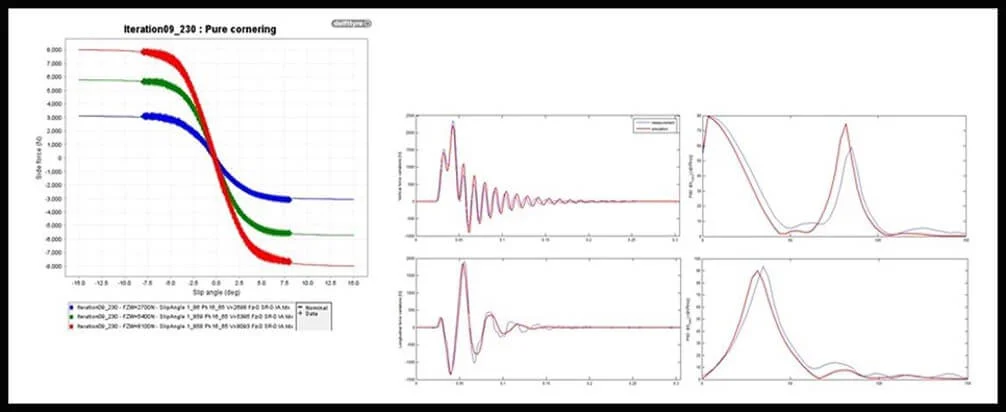
Example tire models supported by GCAPS include but are not limited to:
- FTire
- MF-Swift
- PAC2002